
Blog
Effects of electromagnetic radiation from cell phone usage on various human systems
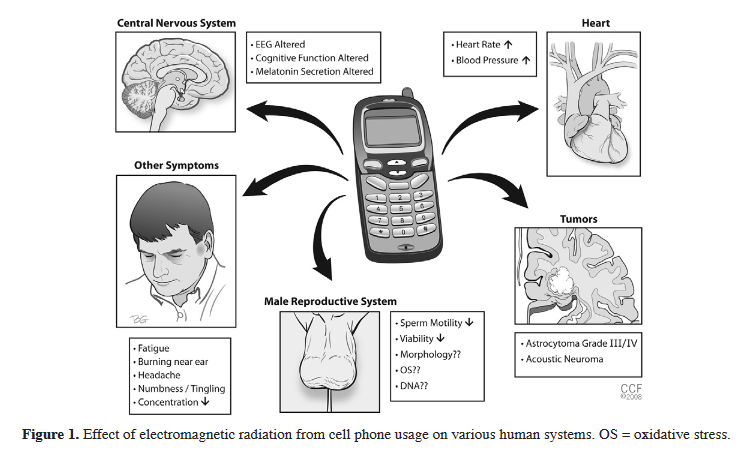
Image source:
Makker, K., Varghese, A., Desai, N. R., Mouradi, R., & Agarwal, A. (2009). Cell phones: Modern man’s nemesis? Reproductive BioMedicine Online. https://doi.org/10.1016/S1472-6483(10)60437-3
“Fine print may protect manufacturers legally. Let’s protect consumers in reality: Put the cell phone safety warnings up front, where we can see them.”
http://showthefineprint.org
Protect yourself: http://showthefineprint.org/protect-yourself
Further References
. (2009). Cell phones: Modern man’s nemesis?. Reproductive BioMedicine Online
Plain numerical DOI: 10.1016/S1472-6483(10)60437-3
DOI URL
directSciHub download
Show/hide publication abstract
. (2008). Cognitive impairment in rats after long-term exposure to GSM-900 mobile phone radiation. Bioelectromagnetics
Plain numerical DOI: 10.1002/bem.20386
DOI URL
directSciHub download
Show/hide publication abstract
. (2012). Microwave radiation induced oxidative stress, cognitive impairment and inflammation in brain of Fischer rats. Indian Journal of Experimental Biology
Plain numerical DOI: 10.1109/GSIS.2011.6044119
DOI URL
directSciHub download
Show/hide publication abstract
. (2006). Mobile phone effects on children’s event-related oscillatory EEG during an auditory memory task. International Journal of Radiation Biology
Plain numerical DOI: 10.1080/09553000600840922
DOI URL
directSciHub download
Show/hide publication abstract
. (2014). Looking at the other side of the coin: The search for possible biopositive cognitive effects of the exposure to 900 MHz GSM mobile phone radiofrequency radiation. Journal of Environmental Health Science and Engineering
Plain numerical DOI: 10.1186/2052-336X-12-75
DOI URL
directSciHub download
Show/hide publication abstract
. (2009). Biological effects of electromagnetic radiation on the nervous system. Journal of Clinical Rehabilitative Tissue Engineering Research
Plain numerical DOI: 10.3969/j.issn.1673-8225.2009.30.031
DOI URL
directSciHub download
Show/hide publication abstract
. (2015). Exposure to 900 MHz electromagnetic fields activates the mkp-1/ERK pathway and causes blood-brain barrier damage and cognitive impairment in rats. Brain Research
Plain numerical DOI: 10.1016/j.brainres.2015.01.019
DOI URL
directSciHub download
Show/hide publication abstract
. (2010). Whole body exposure with GSM 900MHz affects spatial memory in mice. Pathophysiology
Plain numerical DOI: 10.1016/j.pathophys.2009.11.002
DOI URL
directSciHub download
Show/hide publication abstract
. (2015). Memory performance, wireless communication and exposure to radiofrequency electromagnetic fields: A prospective cohort study in adolescents. Environment International
Plain numerical DOI: 10.1016/j.envint.2015.09.025
DOI URL
directSciHub download
Show/hide publication abstract
. (2005). Genetic damage in mobile phone users: some preliminary findings. Indian Journal of Human Genetics
Plain numerical DOI: 10.4103/0971-6866.16810
DOI URL
directSciHub download
Show/hide publication abstract
. (2005). Electromagnetic fields at mobile phone frequency induce apoptosis and inactivation of the multi-chaperone complex in human epidermoid cancer cells. Journal of Cellular Physiology
Plain numerical DOI: 10.1002/jcp.20327
DOI URL
directSciHub download
Show/hide publication abstract
. (2014). 2.45-GHz microwave irradiation adversely affects reproductive function in male mouse, Mus musculus by inducing oxidative and nitrosative stress. Free Radical Research
Plain numerical DOI: 10.3109/10715762.2014.888717
DOI URL
directSciHub download
Show/hide publication abstract
. (2018). Long term exposure to cell phone frequencies (900 and 1800 MHz) induces apoptosis, mitochondrial oxidative stress and TRPV1 channel activation in the hippocampus and dorsal root ganglion of rats. Metabolic Brain Disease
Plain numerical DOI: 10.1007/s11011-017-0180-4
DOI URL
directSciHub download
Show/hide publication abstract
. (2005). Non-thermal DNA breakage by mobile-phone radiation (1800 MHz) in human fibroblasts and in transformed GFSH-R17 rat granulosa cells in vitro. Mutation Research – Genetic Toxicology and Environmental Mutagenesis
Plain numerical DOI: 10.1016/j.mrgentox.2005.03.006
DOI URL
directSciHub download
Show/hide publication abstract
. (2009). Mobile phone radiation induces reactive oxygen species production and DNA damage in human spermatozoa in vitro. PLoS ONE
Plain numerical DOI: 10.1371/journal.pone.0006446
DOI URL
directSciHub download
Show/hide publication abstract
. (2002). Non-thermal activation of the hsp27/p38MAPK stress pathway by mobile phone radiation in human endothelial cells: Molecular mechanism for cancer- and blood-brain barrier-related effects. Differentiation
Plain numerical DOI: 10.1046/j.1432-0436.2002.700207.x
DOI URL
directSciHub download
Show/hide publication abstract
. (2002). Non-thermal activation of the hsp27/p38MAPK stress pathway by mobile phone radiation in human endothelial cells: Molecular mechanism for cancer- and blood-brain barrier-related effects. Differentiation
Plain numerical DOI: 10.1046/j.1432-0436.2002.700207.x
DOI URL
directSciHub download
Show/hide publication abstract
. (2014). Effect of 3G Cell Phone Exposure with Computer Controlled 2-D Stepper Motor on Non-thermal Activation of the hsp27/p38MAPK Stress Pathway in Rat Brain. Cell Biochemistry and Biophysics
Plain numerical DOI: 10.1007/s12013-013-9715-4
DOI URL
directSciHub download
Show/hide publication abstract
. (2013). Cell phone radiation exposure on brain and associated biological systems. Indian Journal of Experimental Biology
Plain numerical DOI: 10.1016/j.biopha.2007.12.004
DOI URL
directSciHub download
Show/hide publication abstract
. (2011). Cell phone radiofrequency radiation exposure and brain glucose metabolism. JAMA – Journal of the American Medical Association
Plain numerical DOI: 10.1001/jama.2011.201
DOI URL
directSciHub download
Show/hide publication abstract
. (2008). Research review on the biological effect of cell phone radiation on human. In 2008 International Conference on Innovations in Information Technology, IIT 2008
Plain numerical DOI: 10.1109/INNOVATIONS.2008.4781774
DOI URL
directSciHub download
Show/hide publication abstract
. (2010). Risks of carcinogenesis from electromagnetic radiation of mobile telephony devices. Experimental Oncology
Plain numerical DOI: 45/835 [pii]
DOI URL
directSciHub download
Show/hide publication abstract
. (2003). Effects of Electromagnetic Radiation of Mobile Phones on the Central Nervous System. Bioelectromagnetics
Plain numerical DOI: 10.1002/bem.10068
DOI URL
directSciHub download
Show/hide publication abstract
. (2007). Cell death induced by GSM 900-MHz and DCS 1800-MHz mobile telephony radiation. Mutation Research – Genetic Toxicology and Environmental Mutagenesis
Plain numerical DOI: 10.1016/j.mrgentox.2006.08.008
DOI URL
directSciHub download
Show/hide publication abstract
Text-to-Speech synthesis algorithm
This is a demo. Type the text and press the play-button.
Typography & processing fluency
 Typeface matters. The ease of information processing effect the way the percipient evaluates information. Therefore, typography is of crucial importance for effective webdesign.
Typeface matters. The ease of information processing effect the way the percipient evaluates information. Therefore, typography is of crucial importance for effective webdesign.
Processing fluency is the ease with which information is processed. Perceptual fluency is the ease of processing stimuli based on manipulations to perceptual quality. Retrieval fluency is the ease with which information can be retrieved from memory.
Source URL: https://en.wikipedia.org/wiki/Processing_fluency
References
. (2004). Processing Fluency and Aesthetic Pleasure: Is Beauty in the Perceiver’s Processing Experience?. Personality and Social Psychology Review
, 8(4), 364–382.
Plain numerical DOI: 10.1207/s15327957pspr0804_3
DOI URL
directSciHub download
Show/hide publication abstract
. (2003). The Effect of Conceptual and Perceptual Fluency on Brand Evaluation. SSRN Electronic Journal
Plain numerical DOI: 10.2139/ssrn.967768
DOI URL
directSciHub download
Show/hide publication abstract
. (2010). Contrast and Assimilation Effects of Processing Fluency. Journal of Consumer Research
, 36(5), 876–889.
Plain numerical DOI: 10.1086/612425
DOI URL
directSciHub download
Show/hide publication abstract
Face recognition software
A facial recognition system is a computer application capable of identifying or verifying a person from a digital image or a video frame from a video source. One of the ways to do this is by comparing selected facial features from the image and a face database.
https://github.com/wesbos/HTML5-Face-Detection
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |
<!DOCTYPE html> <html> <head> <meta http-equiv="Content-Type" content="text/html; charset=UTF-8"> <title>Face Detector</title> <link rel="stylesheet" href="style.css"/> </head> <body> <div class="wrapper"> <h1>HTML5 GLASSES</h1> <p>Created by <a href="http://twitter.com/wesbos" target="_blank" rel="noopener noreferrer">Wes Bos</a>. See full details <a href="">here.</a></p> <!-- Our Main Video Element --> <video height="426" width="640" controls="false"> <source src="videos/wes4.ogg" /> <source src="videos/wes4.mp4" /> </video> <!-- Out Canvas Element for output --> <canvas id="output" height="426" width="640" ></canvas> <!-- div to track progress --> <div id="elapsed_time">Press play for HTML5 Glasses!</div> </div> <script type="text/javascript" src="scripts/ccv.js"></script> <script type="text/javascript" src="scripts/face.js"></script> <script type="text/javascript" src="scripts/scripts.js"></script> </body> </html> |
Cybernetics and webdesign

Cybernetics is a transdisciplinary approach for exploring regulatory systems—their structures, constraints, and possibilities. Norbert Wiener defined cybernetics in 1948 as “the scientific study of control and communication in the animal and the machine.” In other words, it is the scientific study of how humans, animals and machines control and communicate with each other.
Cybernetics is applicable when a system being analyzed incorporates a closed signaling loop—originally referred to as a “circular causal” relationship—that is, where action by the system generates some change in its environment and that change is reflected in the system in some manner (feedback) that triggers a system change. Cybernetics is relevant to, for example, mechanical, physical, biological, cognitive, and social systems. The essential goal of the broad field of cybernetics is to understand and define the functions and processes of systems that have goals and that participate in circular, causal chains that move from action to sensing to comparison with desired goal, and again to action. Its focus is how anything (digital, mechanical or biological) processes information, reacts to information, and changes or can be changed to better accomplish the first two tasks. Cybernetics includes the study of feedback, black boxes and derived concepts such as communication and control in living organisms, machines and organizations including self-organization.
WebGL Interactive Physics Engine
Click with your mouse to interact with the application…
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 |
<html lang="en"> <head> <title>Ammo.js softbody volume demo</title> <meta charset="utf-8"> <meta name="viewport" content="width=device-width, user-scalable=no, minimum-scale=1.0, maximum-scale=1.0"> <link type="text/css" rel="stylesheet" href="main.css"> <style> body { color: #333; } </style> </head> <body> <div id="info"> Ammo.js physics soft body volume demo<br/> Click to throw a ball </div> <div id="container"></div> <script src="../build/three.js"></script> <script src="js/libs/ammo.js"></script> <script src="js/controls/OrbitControls.js"></script> <script src="js/utils/BufferGeometryUtils.js"></script> <script src="js/WebGL.js"></script> <script src="js/libs/stats.min.js"></script> <script> if ( WEBGL.isWebGLAvailable() === false ) { document.body.appendChild( WEBGL.getWebGLErrorMessage() ); } // Graphics variables var container, stats; var camera, controls, scene, renderer; var textureLoader; var clock = new THREE.Clock(); var clickRequest = false; var mouseCoords = new THREE.Vector2(); var raycaster = new THREE.Raycaster(); var ballMaterial = new THREE.MeshPhongMaterial( { color: 0x202020 } ); var pos = new THREE.Vector3(); var quat = new THREE.Quaternion(); // Physics variables var gravityConstant = - 9.8; var physicsWorld; var rigidBodies = []; var softBodies = []; var margin = 0.05; var transformAux1; var softBodyHelpers; Ammo().then( function( AmmoLib ) { Ammo = AmmoLib; init(); animate(); } ); function init() { initGraphics(); initPhysics(); createObjects(); initInput(); } function initGraphics() { container = document.getElementById( 'container' ); camera = new THREE.PerspectiveCamera( 60, window.innerWidth / window.innerHeight, 0.2, 2000 ); scene = new THREE.Scene(); scene.background = new THREE.Color( 0xbfd1e5 ); camera.position.set( - 7, 5, 8 ); renderer = new THREE.WebGLRenderer(); renderer.setPixelRatio( window.devicePixelRatio ); renderer.setSize( window.innerWidth, window.innerHeight ); renderer.shadowMap.enabled = true; container.appendChild( renderer.domElement ); controls = new THREE.OrbitControls( camera, renderer.domElement ); controls.target.set( 0, 2, 0 ); controls.update(); textureLoader = new THREE.TextureLoader(); var ambientLight = new THREE.AmbientLight( 0x404040 ); scene.add( ambientLight ); var light = new THREE.DirectionalLight( 0xffffff, 1 ); light.position.set( - 10, 10, 5 ); light.castShadow = true; var d = 20; light.shadow.camera.left = - d; light.shadow.camera.right = d; light.shadow.camera.top = d; light.shadow.camera.bottom = - d; light.shadow.camera.near = 2; light.shadow.camera.far = 50; light.shadow.mapSize.x = 1024; light.shadow.mapSize.y = 1024; scene.add( light ); stats = new Stats(); stats.domElement.style.position = 'absolute'; stats.domElement.style.top = '0px'; container.appendChild( stats.domElement ); window.addEventListener( 'resize', onWindowResize, false ); } function initPhysics() { // Physics configuration var collisionConfiguration = new Ammo.btSoftBodyRigidBodyCollisionConfiguration(); var dispatcher = new Ammo.btCollisionDispatcher( collisionConfiguration ); var broadphase = new Ammo.btDbvtBroadphase(); var solver = new Ammo.btSequentialImpulseConstraintSolver(); var softBodySolver = new Ammo.btDefaultSoftBodySolver(); physicsWorld = new Ammo.btSoftRigidDynamicsWorld( dispatcher, broadphase, solver, collisionConfiguration, softBodySolver ); physicsWorld.setGravity( new Ammo.btVector3( 0, gravityConstant, 0 ) ); physicsWorld.getWorldInfo().set_m_gravity( new Ammo.btVector3( 0, gravityConstant, 0 ) ); transformAux1 = new Ammo.btTransform(); softBodyHelpers = new Ammo.btSoftBodyHelpers(); } function createObjects() { // Ground pos.set( 0, - 0.5, 0 ); quat.set( 0, 0, 0, 1 ); var ground = createParalellepiped( 40, 1, 40, 0, pos, quat, new THREE.MeshPhongMaterial( { color: 0xFFFFFF } ) ); ground.castShadow = true; ground.receiveShadow = true; textureLoader.load( "textures/grid.png", function ( texture ) { texture.wrapS = THREE.RepeatWrapping; texture.wrapT = THREE.RepeatWrapping; texture.repeat.set( 40, 40 ); ground.material.map = texture; ground.material.needsUpdate = true; } ); // Create soft volumes var volumeMass = 15; var sphereGeometry = new THREE.SphereBufferGeometry( 1.5, 40, 25 ); sphereGeometry.translate( 5, 5, 0 ); createSoftVolume( sphereGeometry, volumeMass, 250 ); var boxGeometry = new THREE.BoxBufferGeometry( 1, 1, 5, 4, 4, 20 ); boxGeometry.translate( - 2, 5, 0 ); createSoftVolume( boxGeometry, volumeMass, 120 ); // Ramp pos.set( 3, 1, 0 ); quat.setFromAxisAngle( new THREE.Vector3( 0, 0, 1 ), 30 * Math.PI / 180 ); var obstacle = createParalellepiped( 10, 1, 4, 0, pos, quat, new THREE.MeshPhongMaterial( { color: 0x606060 } ) ); obstacle.castShadow = true; obstacle.receiveShadow = true; } function processGeometry( bufGeometry ) { // Ony consider the position values when merging the vertices var posOnlyBufGeometry = new THREE.BufferGeometry(); posOnlyBufGeometry.addAttribute( 'position', bufGeometry.getAttribute( 'position' ) ); posOnlyBufGeometry.setIndex( bufGeometry.getIndex() ); // Merge the vertices so the triangle soup is converted to indexed triangles var indexedBufferGeom = THREE.BufferGeometryUtils.mergeVertices( posOnlyBufGeometry ); // Create index arrays mapping the indexed vertices to bufGeometry vertices mapIndices( bufGeometry, indexedBufferGeom ); } function isEqual( x1, y1, z1, x2, y2, z2 ) { var delta = 0.000001; return Math.abs( x2 - x1 ) < delta && Math.abs( y2 - y1 ) < delta && Math.abs( z2 - z1 ) < delta; } function mapIndices( bufGeometry, indexedBufferGeom ) { // Creates ammoVertices, ammoIndices and ammoIndexAssociation in bufGeometry var vertices = bufGeometry.attributes.position.array; var idxVertices = indexedBufferGeom.attributes.position.array; var indices = indexedBufferGeom.index.array; var numIdxVertices = idxVertices.length / 3; var numVertices = vertices.length / 3; bufGeometry.ammoVertices = idxVertices; bufGeometry.ammoIndices = indices; bufGeometry.ammoIndexAssociation = []; for ( var i = 0; i < numIdxVertices; i ++ ) { var association = []; bufGeometry.ammoIndexAssociation.push( association ); var i3 = i * 3; for ( var j = 0; j < numVertices; j ++ ) { var j3 = j * 3; if ( isEqual( idxVertices[ i3 ], idxVertices[ i3 + 1 ], idxVertices[ i3 + 2 ], vertices[ j3 ], vertices[ j3 + 1 ], vertices[ j3 + 2 ] ) ) { association.push( j3 ); } } } } function createSoftVolume( bufferGeom, mass, pressure ) { processGeometry( bufferGeom ); var volume = new THREE.Mesh( bufferGeom, new THREE.MeshPhongMaterial( { color: 0xFFFFFF } ) ); volume.castShadow = true; volume.receiveShadow = true; volume.frustumCulled = false; scene.add( volume ); textureLoader.load( "textures/colors.png", function ( texture ) { volume.material.map = texture; volume.material.needsUpdate = true; } ); // Volume physic object var volumeSoftBody = softBodyHelpers.CreateFromTriMesh( physicsWorld.getWorldInfo(), bufferGeom.ammoVertices, bufferGeom.ammoIndices, bufferGeom.ammoIndices.length / 3, true ); var sbConfig = volumeSoftBody.get_m_cfg(); sbConfig.set_viterations( 40 ); sbConfig.set_piterations( 40 ); // Soft-soft and soft-rigid collisions sbConfig.set_collisions( 0x11 ); // Friction sbConfig.set_kDF( 0.1 ); // Damping sbConfig.set_kDP( 0.01 ); // Pressure sbConfig.set_kPR( pressure ); // Stiffness volumeSoftBody.get_m_materials().at( 0 ).set_m_kLST( 0.9 ); volumeSoftBody.get_m_materials().at( 0 ).set_m_kAST( 0.9 ); volumeSoftBody.setTotalMass( mass, false ); Ammo.castObject( volumeSoftBody, Ammo.btCollisionObject ).getCollisionShape().setMargin( margin ); physicsWorld.addSoftBody( volumeSoftBody, 1, - 1 ); volume.userData.physicsBody = volumeSoftBody; // Disable deactivation volumeSoftBody.setActivationState( 4 ); softBodies.push( volume ); } function createParalellepiped( sx, sy, sz, mass, pos, quat, material ) { var threeObject = new THREE.Mesh( new THREE.BoxBufferGeometry( sx, sy, sz, 1, 1, 1 ), material ); var shape = new Ammo.btBoxShape( new Ammo.btVector3( sx * 0.5, sy * 0.5, sz * 0.5 ) ); shape.setMargin( margin ); createRigidBody( threeObject, shape, mass, pos, quat ); return threeObject; } function createRigidBody( threeObject, physicsShape, mass, pos, quat ) { threeObject.position.copy( pos ); threeObject.quaternion.copy( quat ); var transform = new Ammo.btTransform(); transform.setIdentity(); transform.setOrigin( new Ammo.btVector3( pos.x, pos.y, pos.z ) ); transform.setRotation( new Ammo.btQuaternion( quat.x, quat.y, quat.z, quat.w ) ); var motionState = new Ammo.btDefaultMotionState( transform ); var localInertia = new Ammo.btVector3( 0, 0, 0 ); physicsShape.calculateLocalInertia( mass, localInertia ); var rbInfo = new Ammo.btRigidBodyConstructionInfo( mass, motionState, physicsShape, localInertia ); var body = new Ammo.btRigidBody( rbInfo ); threeObject.userData.physicsBody = body; scene.add( threeObject ); if ( mass > 0 ) { rigidBodies.push( threeObject ); // Disable deactivation body.setActivationState( 4 ); } physicsWorld.addRigidBody( body ); return body; } function initInput() { window.addEventListener( 'mousedown', function ( event ) { if ( ! clickRequest ) { mouseCoords.set( ( event.clientX / window.innerWidth ) * 2 - 1, - ( event.clientY / window.innerHeight ) * 2 + 1 ); clickRequest = true; } }, false ); } function processClick() { if ( clickRequest ) { raycaster.setFromCamera( mouseCoords, camera ); // Creates a ball var ballMass = 3; var ballRadius = 0.4; var ball = new THREE.Mesh( new THREE.SphereBufferGeometry( ballRadius, 18, 16 ), ballMaterial ); ball.castShadow = true; ball.receiveShadow = true; var ballShape = new Ammo.btSphereShape( ballRadius ); ballShape.setMargin( margin ); pos.copy( raycaster.ray.direction ); pos.add( raycaster.ray.origin ); quat.set( 0, 0, 0, 1 ); var ballBody = createRigidBody( ball, ballShape, ballMass, pos, quat ); ballBody.setFriction( 0.5 ); pos.copy( raycaster.ray.direction ); pos.multiplyScalar( 14 ); ballBody.setLinearVelocity( new Ammo.btVector3( pos.x, pos.y, pos.z ) ); clickRequest = false; } } function onWindowResize() { camera.aspect = window.innerWidth / window.innerHeight; camera.updateProjectionMatrix(); renderer.setSize( window.innerWidth, window.innerHeight ); } function animate() { requestAnimationFrame( animate ); render(); stats.update(); } function render() { var deltaTime = clock.getDelta(); updatePhysics( deltaTime ); processClick(); renderer.render( scene, camera ); } function updatePhysics( deltaTime ) { // Step world physicsWorld.stepSimulation( deltaTime, 10 ); // Update soft volumes for ( var i = 0, il = softBodies.length; i < il; i ++ ) { var volume = softBodies[ i ]; var geometry = volume.geometry; var softBody = volume.userData.physicsBody; var volumePositions = geometry.attributes.position.array; var volumeNormals = geometry.attributes.normal.array; var association = geometry.ammoIndexAssociation; var numVerts = association.length; var nodes = softBody.get_m_nodes(); for ( var j = 0; j < numVerts; j ++ ) { var node = nodes.at( j ); var nodePos = node.get_m_x(); var x = nodePos.x(); var y = nodePos.y(); var z = nodePos.z(); var nodeNormal = node.get_m_n(); var nx = nodeNormal.x(); var ny = nodeNormal.y(); var nz = nodeNormal.z(); var assocVertex = association[ j ]; for ( var k = 0, kl = assocVertex.length; k < kl; k ++ ) { var indexVertex = assocVertex[ k ]; volumePositions[ indexVertex ] = x; volumeNormals[ indexVertex ] = nx; indexVertex ++; volumePositions[ indexVertex ] = y; volumeNormals[ indexVertex ] = ny; indexVertex ++; volumePositions[ indexVertex ] = z; volumeNormals[ indexVertex ] = nz; } } geometry.attributes.position.needsUpdate = true; geometry.attributes.normal.needsUpdate = true; } // Update rigid bodies for ( var i = 0, il = rigidBodies.length; i < il; i ++ ) { var objThree = rigidBodies[ i ]; var objPhys = objThree.userData.physicsBody; var ms = objPhys.getMotionState(); if ( ms ) { ms.getWorldTransform( transformAux1 ); var p = transformAux1.getOrigin(); var q = transformAux1.getRotation(); objThree.position.set( p.x(), p.y(), p.z() ); objThree.quaternion.set( q.x(), q.y(), q.z(), q.w() ); } } } </script> </body> </html> Source URL: https://github.com/mrdoob/three.js/blob/master/examples/webgl_physics_volume.html |
3D Webdesign: The next frontier
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 |
<!DOCTYPE html> <!DOCTYPE html> <html lang="en"> <head> <title>three.js - kinect</title> <meta charset="utf-8"> <meta name="viewport" content="width=device-width, user-scalable=no, minimum-scale=1.0, maximum-scale=1.0"> <link type="text/css" rel="stylesheet" href="main.css"> </head> <body> <script src="../build/three.js"></script> <script src='js/libs/dat.gui.min.js'></script> <script src="js/libs/stats.min.js"></script> <script src="js/WebGL.js"></script> <video id="video" loop muted crossOrigin="anonymous" webkit-playsinline style="display:none"> <source src="textures/kinect.webm"> <source src="textures/kinect.mp4"> </video> <script id="vs" type="x-shader/x-vertex"> uniform sampler2D map; uniform float width; uniform float height; uniform float nearClipping, farClipping; uniform float pointSize; uniform float zOffset; varying vec2 vUv; const float XtoZ = 1.11146; // tan( 1.0144686 / 2.0 ) * 2.0; const float YtoZ = 0.83359; // tan( 0.7898090 / 2.0 ) * 2.0; void main() { vUv = vec2( position.x / width, position.y / height ); vec4 color = texture2D( map, vUv ); float depth = ( color.r + color.g + color.b ) / 3.0; // Projection code by @kcmic float z = ( 1.0 - depth ) * (farClipping - nearClipping) + nearClipping; vec4 pos = vec4( ( position.x / width - 0.5 ) * z * XtoZ, ( position.y / height - 0.5 ) * z * YtoZ, - z + zOffset, 1.0); gl_PointSize = pointSize; gl_Position = projectionMatrix * modelViewMatrix * pos; } </script> <script id="fs" type="x-shader/x-fragment"> uniform sampler2D map; varying vec2 vUv; void main() { vec4 color = texture2D( map, vUv ); gl_FragColor = vec4( color.r, color.g, color.b, 0.2 ); } </script> <script> var container; var scene, camera, renderer; var geometry, mesh, material; var mouse, center; var stats; if ( WEBGL.isWebGLAvailable() ) { init(); animate(); } else { document.body.appendChild( WEBGL.getWebGLErrorMessage() ); } function init() { container = document.createElement( 'div' ); document.body.appendChild( container ); var info = document.createElement( 'div' ); info.id = 'info'; info.innerHTML = '<a href="http://threejs.org" target="_blank" rel="noopener noreferrer">three.js</a> - kinect'; document.body.appendChild( info ); stats = new Stats(); // container.appendChild( stats.dom ); camera = new THREE.PerspectiveCamera( 50, window.innerWidth / window.innerHeight, 1, 10000 ); camera.position.set( 0, 0, 500 ); scene = new THREE.Scene(); center = new THREE.Vector3(); center.z = - 1000; var video = document.getElementById( 'video' ); video.addEventListener( 'loadedmetadata', function () { var texture = new THREE.VideoTexture( video ); texture.minFilter = THREE.NearestFilter; var width = 640, height = 480; var nearClipping = 850, farClipping = 4000; geometry = new THREE.BufferGeometry(); var vertices = new Float32Array( width * height * 3 ); for ( var i = 0, j = 0, l = vertices.length; i < l; i += 3, j ++ ) { vertices[ i ] = j % width; vertices[ i + 1 ] = Math.floor( j / width ); } geometry.addAttribute( 'position', new THREE.BufferAttribute( vertices, 3 ) ); material = new THREE.ShaderMaterial( { uniforms: { "map": { value: texture }, "width": { value: width }, "height": { value: height }, "nearClipping": { value: nearClipping }, "farClipping": { value: farClipping }, "pointSize": { value: 2 }, "zOffset": { value: 1000 } }, vertexShader: document.getElementById( 'vs' ).textContent, fragmentShader: document.getElementById( 'fs' ).textContent, blending: THREE.AdditiveBlending, depthTest: false, depthWrite: false, transparent: true } ); mesh = new THREE.Points( geometry, material ); scene.add( mesh ); var gui = new dat.GUI(); gui.add( material.uniforms.nearClipping, 'value', 1, 10000, 1.0 ).name( 'nearClipping' ); gui.add( material.uniforms.farClipping, 'value', 1, 10000, 1.0 ).name( 'farClipping' ); gui.add( material.uniforms.pointSize, 'value', 1, 10, 1.0 ).name( 'pointSize' ); gui.add( material.uniforms.zOffset, 'value', 0, 4000, 1.0 ).name( 'zOffset' ); gui.close(); }, false ); video.play(); renderer = new THREE.WebGLRenderer(); renderer.setPixelRatio( window.devicePixelRatio ); renderer.setSize( window.innerWidth, window.innerHeight ); container.appendChild( renderer.domElement ); mouse = new THREE.Vector3( 0, 0, 1 ); document.addEventListener( 'mousemove', onDocumentMouseMove, false ); // window.addEventListener( 'resize', onWindowResize, false ); } function onWindowResize() { camera.aspect = window.innerWidth / window.innerHeight; camera.updateProjectionMatrix(); renderer.setSize( window.innerWidth, window.innerHeight ); } function onDocumentMouseMove( event ) { mouse.x = ( event.clientX - window.innerWidth / 2 ) * 8; mouse.y = ( event.clientY - window.innerHeight / 2 ) * 8; } function animate() { requestAnimationFrame( animate ); render(); stats.update(); } function render() { camera.position.x += ( mouse.x - camera.position.x ) * 0.05; camera.position.y += ( - mouse.y - camera.position.y ) * 0.05; camera.lookAt( center ); renderer.render( scene, camera ); } </script> </body> </html> Source: https://threejs.org |
Bistable perception and perceptual-shifts
Visit www.qbism.art for an art/science web-project which focuses on bistable perception from a quantum cognition perspective.
References
. (2015). Brain networks underlying bistable perception. NeuroImage, 119, 229–234.
Plain numerical DOI: 10.1016/j.neuroimage.2015.06.053
DOI URL
directSciHub download